Вам понадобится
- - Arduino;
- - ультразвуковой датчик HC-SR04;
- - соединительные провода.
Инструкция
1
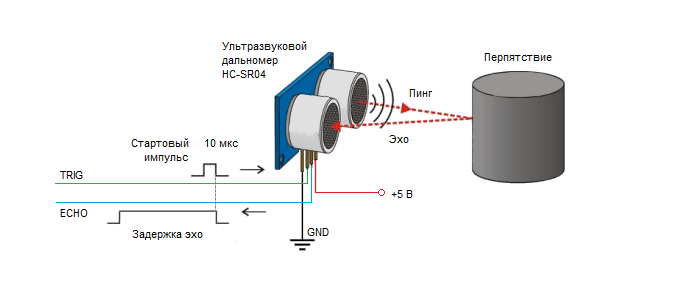
Действие ультразвукового дальномера HC-SR04 основано на принципе эхолокации. Он излучает звуковые импульсы в пространство и принимает отражённый от препятствия сигнал. По времени распространения звуковой волны к препятствию и обратно определяется расстояние до объекта.
Запуск звуковой волны начинается с подачи положительного импульса длительностью не менее 10 микросекунд на ножку TRIG дальномера. Как только импульс заканчивается, дальномер излучает в пространство перед собой пачку звуковых импульсов частотой 40 кГц. В это же время запускается алгоритм определения времени задержки отражённого сигнала, а на ножке ECHO дальномера появляется логическая единица. Как только датчик улавливает отражённый сигнал, на выводе ECHO появляется логический ноль. По длительности этого сигнала ("Задержка эхо" на рисунке) определяется расстояние до объекта.
Диапазон измерения расстояния дальномера HC-SR04 - до 4 метров с разрешением 0,3 см. Угол наблюдения - 30 градусов, эффективный угол - 15 градусов. Ток потребления в режиме ожидания 2 мА, при работе - 15 мА.
Запуск звуковой волны начинается с подачи положительного импульса длительностью не менее 10 микросекунд на ножку TRIG дальномера. Как только импульс заканчивается, дальномер излучает в пространство перед собой пачку звуковых импульсов частотой 40 кГц. В это же время запускается алгоритм определения времени задержки отражённого сигнала, а на ножке ECHO дальномера появляется логическая единица. Как только датчик улавливает отражённый сигнал, на выводе ECHO появляется логический ноль. По длительности этого сигнала ("Задержка эхо" на рисунке) определяется расстояние до объекта.
Диапазон измерения расстояния дальномера HC-SR04 - до 4 метров с разрешением 0,3 см. Угол наблюдения - 30 градусов, эффективный угол - 15 градусов. Ток потребления в режиме ожидания 2 мА, при работе - 15 мА.
2
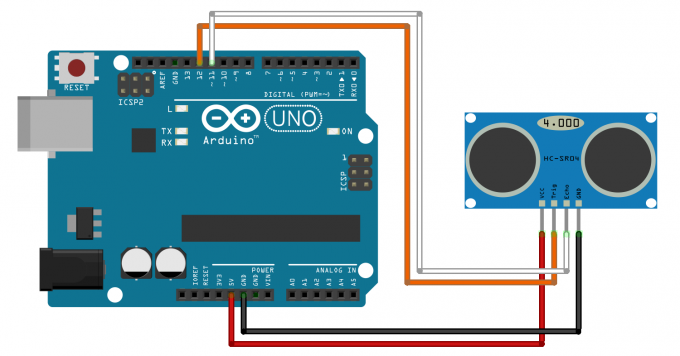
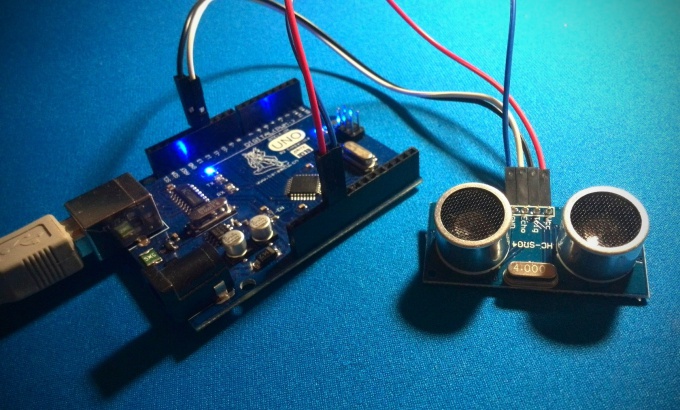
Питание ультразвукового дальномера осуществляется напряжением +5 В. Два других вывода подключаются к любым цифровым портам Arduino, мы подключим к 11 и 12.
3
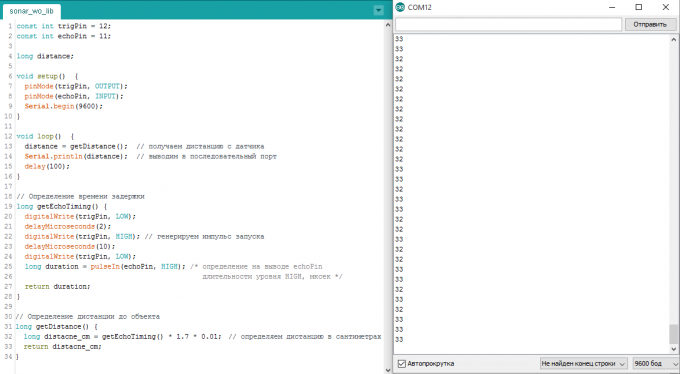
Теперь напишем скетч, определяющий расстояние до препятствия и выводящий его в последовательный порт. Сначала задаём номера выводов TRIG и ECHO - это 12 и 11 пины. Затем объявляем триггер как выход, а эхо - как вход. Инициализируем последовательный порт на скорости 9600 бод. В каждом повторении цикла loop() считываем дистанцию и выводим в порт.
Функция getEchoTiming() генерирует импульс запуска. Она как раз создаёт ток 10 мксек импульс, который является триггером для начала излучения дальномером звукового пакета в пространство. Далее она запоминает время от начала передачи звуковой волны до прихода эха.
Функция getDistance() рассчитывает дистанцию до объекта. Из школьного курса физики мы помним, что расстояние равно скорость умножить на время: S = V*t. Скорость звука в воздухе 340 м/сек, время в микросекундах мы знаем, это "duratuion". Чтобы получить время в секундах, нужно разделить на 1.000.000. Так как звук проходит двойное расстояние - до объекта и обратно - нужно разделить расстояние пополам. Вот и получается, что расстояние до объекта S = 34000 см/сек * duration / 1.000.000 сек / 2 = 1,7 см/сек / 100, что мы и написали в скетче. Операцию умножения микроконтроллер выполняет быстрее, чем деления, поэтому "/ 100" я заменил на эквивалентное "* 0,01".
Функция getEchoTiming() генерирует импульс запуска. Она как раз создаёт ток 10 мксек импульс, который является триггером для начала излучения дальномером звукового пакета в пространство. Далее она запоминает время от начала передачи звуковой волны до прихода эха.
Функция getDistance() рассчитывает дистанцию до объекта. Из школьного курса физики мы помним, что расстояние равно скорость умножить на время: S = V*t. Скорость звука в воздухе 340 м/сек, время в микросекундах мы знаем, это "duratuion". Чтобы получить время в секундах, нужно разделить на 1.000.000. Так как звук проходит двойное расстояние - до объекта и обратно - нужно разделить расстояние пополам. Вот и получается, что расстояние до объекта S = 34000 см/сек * duration / 1.000.000 сек / 2 = 1,7 см/сек / 100, что мы и написали в скетче. Операцию умножения микроконтроллер выполняет быстрее, чем деления, поэтому "/ 100" я заменил на эквивалентное "* 0,01".
4
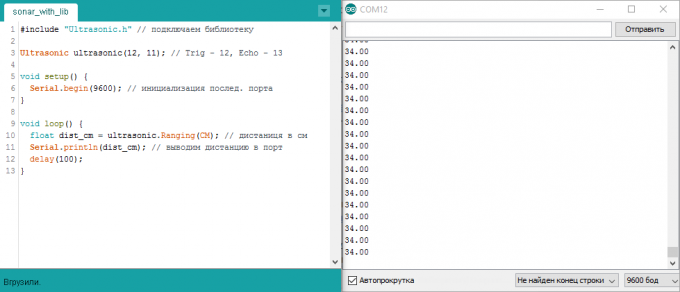
Также для работы с ультразвуковым дальномером написано множество библиотек. Например, вот эта: http://robocraft.ru/files/sensors/Ultrasonic/HC-SR04/ultrasonic-HC-SR04.zip. Установка библиотеки происходит стандартно: скачать, разархивировать в директорию libraries, которая находится в папке с Arduino IDE. После этого библиотекой можно пользоваться.
Установив библиотеку, напишем новый скетч. Результат его работы тот же - в мониторе последовательного порта выводится дистанция до объекта в сантиметрах. Если в скетче написать float dist_cm = ultrasonic.Ranging(INC);, то дистанция будет отображаться в дюймах.
Установив библиотеку, напишем новый скетч. Результат его работы тот же - в мониторе последовательного порта выводится дистанция до объекта в сантиметрах. Если в скетче написать float dist_cm = ultrasonic.Ranging(INC);, то дистанция будет отображаться в дюймах.
5
Итак, мы с вами подключили к Arduino ультразвуковой дальномер HC-SR04 и получили с него данные двумя разными способами: с использованием специальной библиотеки и без.
Преимущество использования библиотеки в том, что количество кода значительно сокращается и улучшается читаемость программы, вам не приходится вникать в тонкости работы устройства и вы сразу же можете его использовать. Но в этом же кроется и недостаток: вы хуже понимаете, как работает устройство и какие в нём происходят процессы. В любом случае, каким способом пользоваться - решать только вам.
Преимущество использования библиотеки в том, что количество кода значительно сокращается и улучшается читаемость программы, вам не приходится вникать в тонкости работы устройства и вы сразу же можете его использовать. Но в этом же кроется и недостаток: вы хуже понимаете, как работает устройство и какие в нём происходят процессы. В любом случае, каким способом пользоваться - решать только вам.
Видео по теме