{kind=link}
Вам понадобится
- - Arduino;
- - модуль с электретным капсюльным микрофоном CMA-4544PF-W;
- - соединительные провода.
Инструкция
1
Электретный микрофон CMA-4544PF-W, который является основой модуля, реагирует на звуковые волны с частотами от 20 Гц до 20 кГц. Микрофон является всенаправленным, т.е. чувствителен к звуку, приходящему со всех направлений, с чувствительностью -44 дБ. Более подробно об устройстве и принципе действия электретных микрофонов можно почитать в статье, ссылка на которую приведена в списке источников.
{kind=link}
2
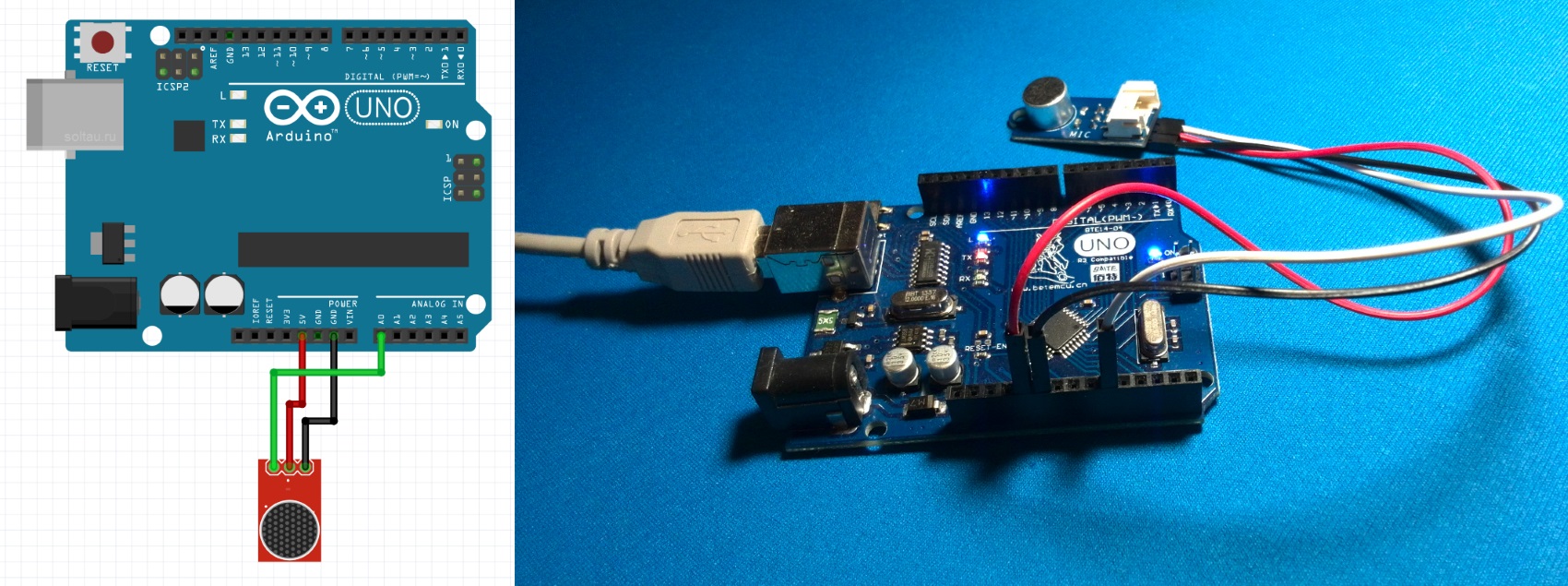
Модуль содержит в себе электретный микрофон, которому необходимо питание от 3 до 10 вольт. Полярность при подключении важна. Подключим модуль по простой схеме: вывод "V" модуля - к питанию +3,3 или +5 вольт, выводу "G" модуля - к GND Arduino, вывод "S" - к аналоговому порту "A0" Arduino.
{kind=link}
3
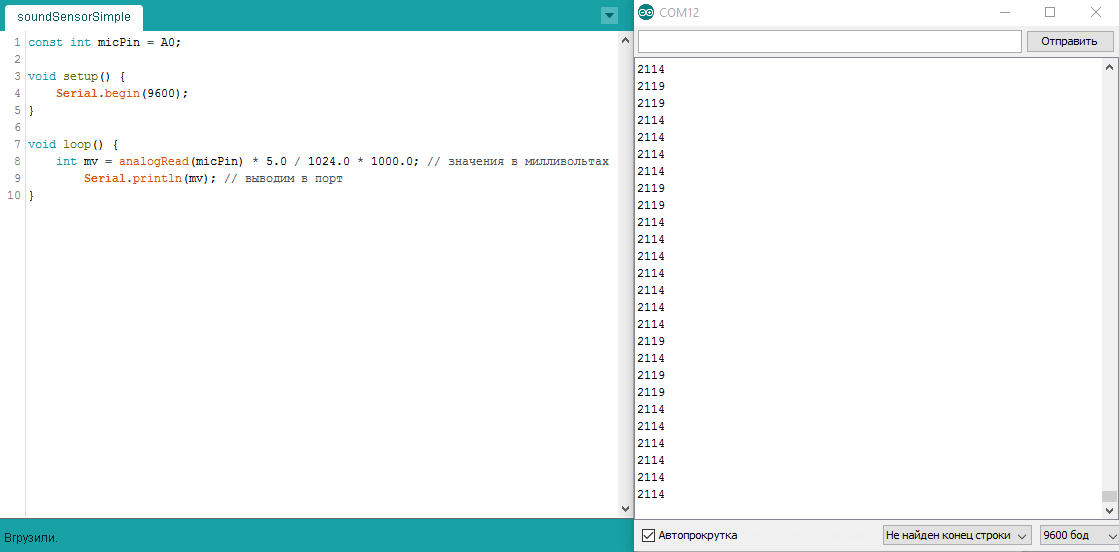
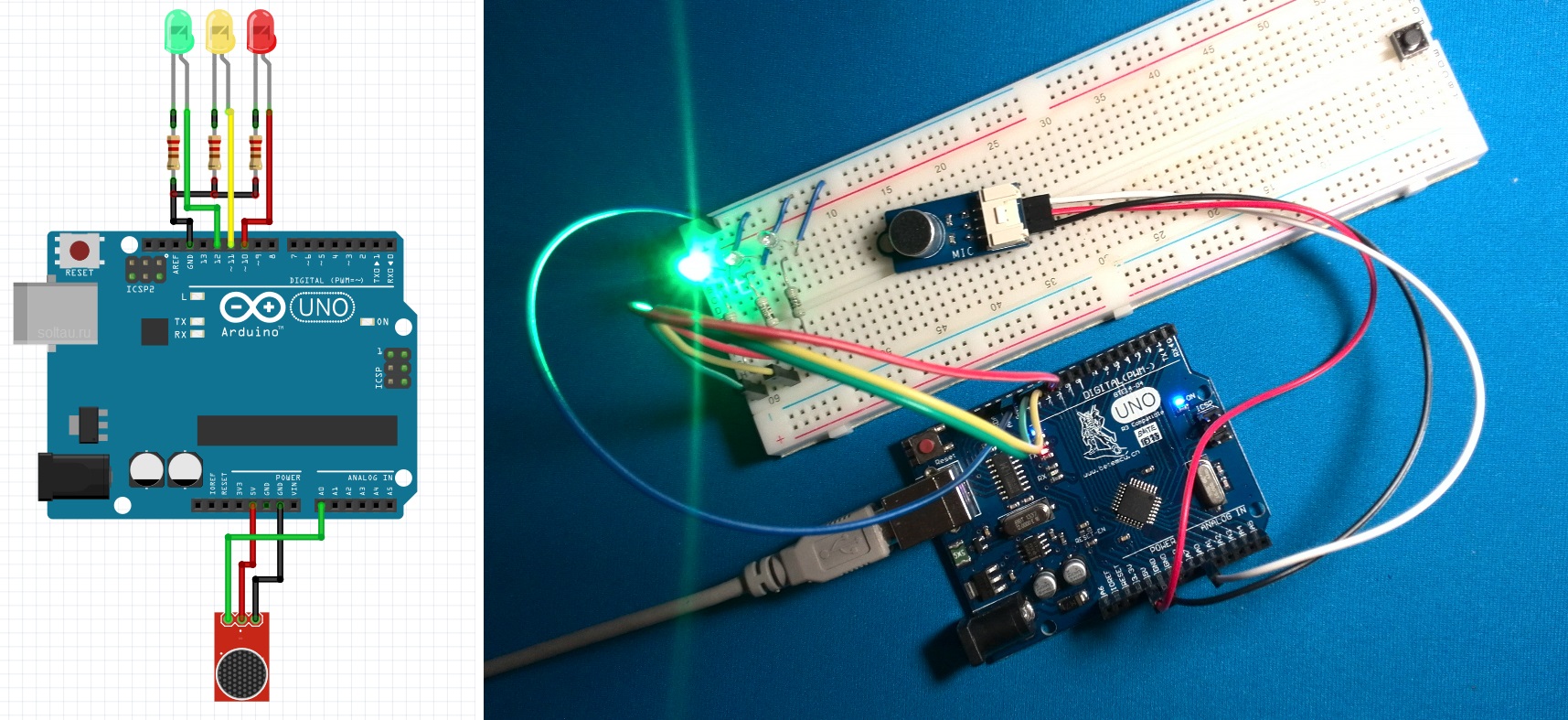
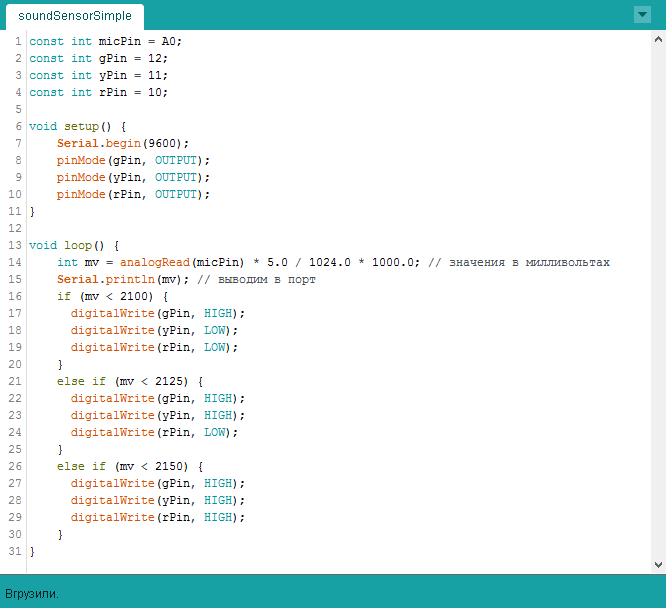
Напишем программу для Arduino, которая будет считывать показания с микрофона и выводить их в последовательный порт в милливольтах. Для чего это может понадобиться? Например, для измерения уровня шума; для управления роботом: поехать по хлопку или остановиться. Некоторые даже умудряются "обучить" Arduino определять разные звуки и таким образом создают более интеллектуальное управление: робот будет понимать команды "Стоп" и "Иди" (как, например, в статье "Распознавание голоса с помощью Arduino" в источниках).
{kind=link}
{kind=link}
{kind=link}