{kind=link}
Вам понадобится
- - Arduino UNO или аналог;
- - ультразвуковой дальномер (ultrasonic module) HC-SR04 или аналог;
- - драйвер двигателя L9110S или аналог;
- - гусеничная платформа для танка Pololu Zumo или аналог;
- - кусок стеклотекстолита по размеру платы Ардуино или шилд для прототипирования;
- - 2 электродвигателя, подходящие к выбранному шасси;
- - 2 белых светодиода (передние "фары"), 2 красных светодиода (задние "фары") и 4 резистора 180-220 Ом;
- - батарейки (1 "Крона" или 4-6 пальчиковых);
- - соединительные провода;
- - паяльник;
- - компьютер;
- - крепёж - 6-10 болтов М2,5, шайбы, гайки к ним.
Инструкция
1
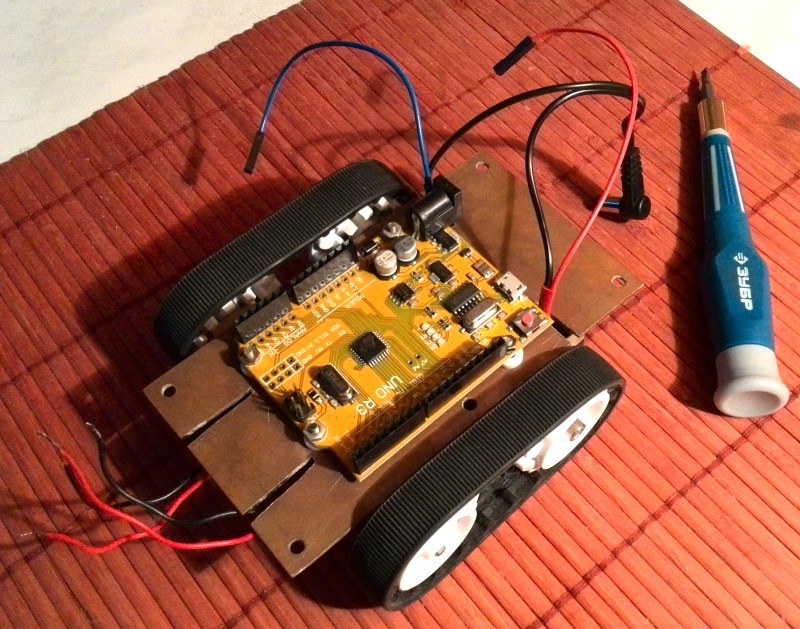
Первым делом соберём платформу. В одной из предыдущих статей мы подробно рассматривали, как сделать шасси игрушечного вездехода. Здесь действия будут точно такими же. Поэтому подробно останавливаться на этом не будем. Собранные шасси для вездехода с установленной на них платой Arduino показаны на фото.
{kind=link}
2
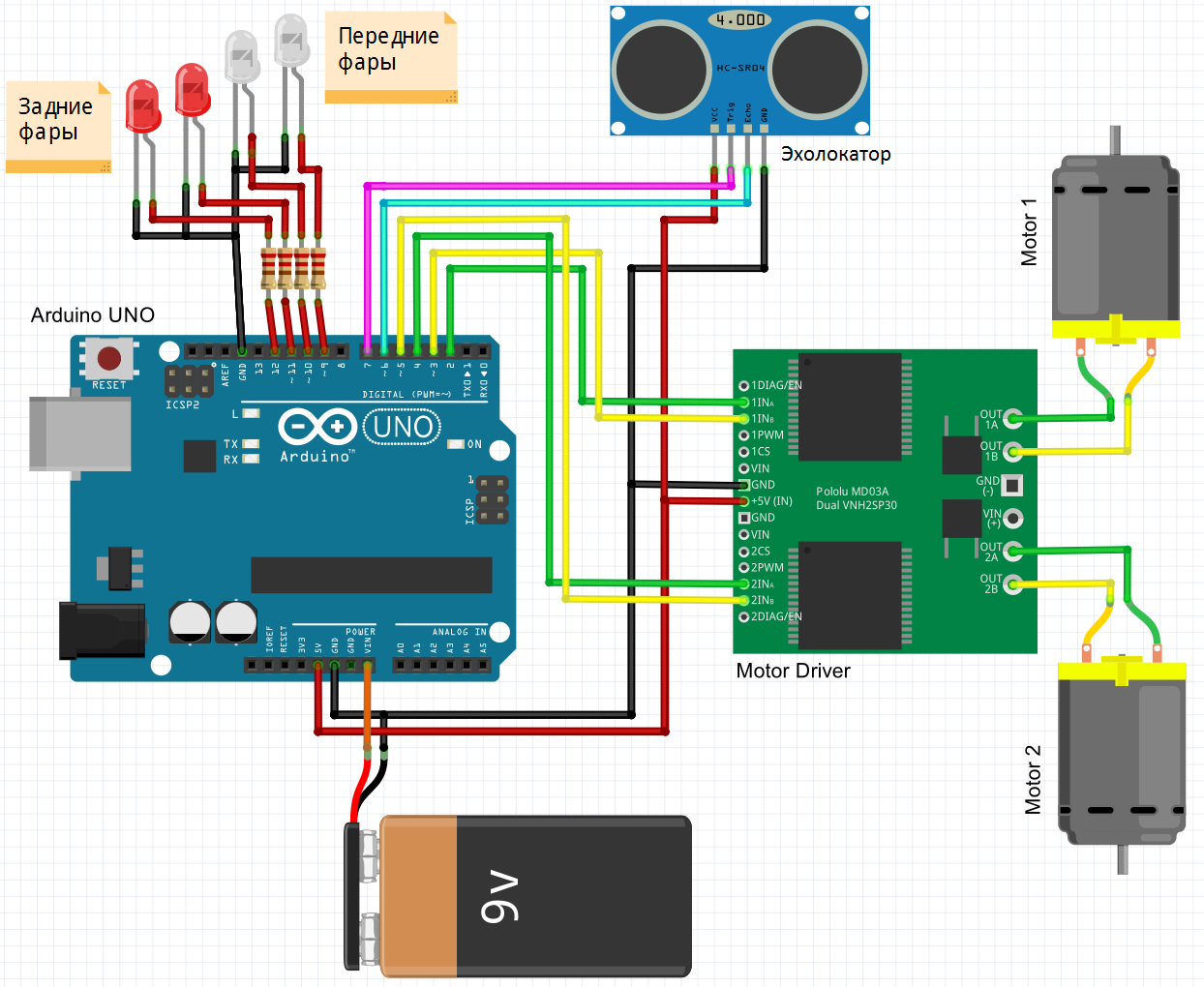
Теперь очередь за электроникой. Сначала рассмотрим схему соединений. Обратите внимание, что все светодиоды подключаются через резисторы номиналом около 200 Ом. Эхолокатор подключается к двум произвольным цифровым пинам Ардуино и питанию +5В. Подключение драйвера двигателей к Ардуино и к двигателям видно на схеме. Если есть какие-то неясности - почитайте прошлую статью, где мы рассматривали это подробнее, или задавайте вопросы в комментариях.
{kind=link}
3
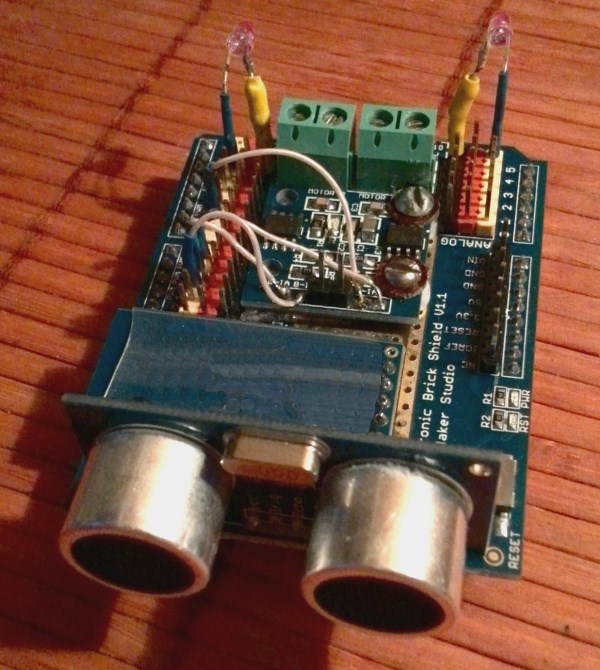
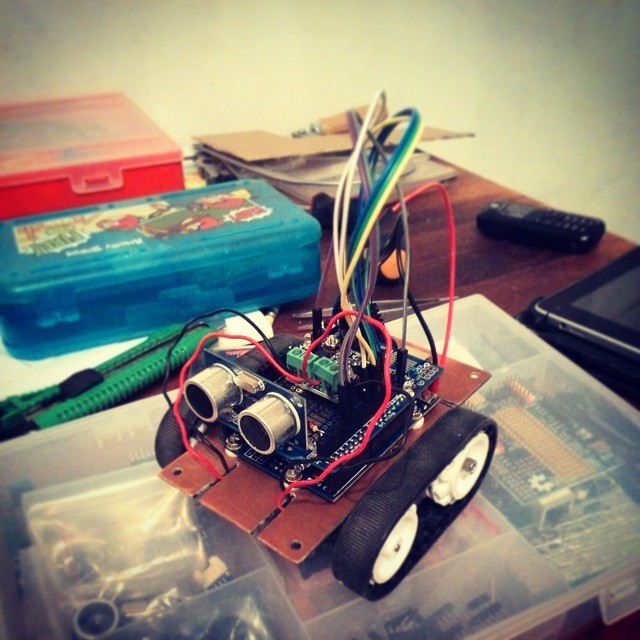
Соберём по вышеприведённой схеме сердце и мозг нашего игрушечного вездехода. Можно смонтировать всё на монтажной плате - это намного удобнее для монтажа и возможных будущих модификаций. На фото электронные компоненты размещены на специальном шилде для прототипирования для Ардуино Уно. Эхолокатор смотрит прямо по курсу движения вездехода. Задние светодиоды будут имитировать стоп-сигнальные фары, передние, соответственно - передние фары.
{kind=link}
4
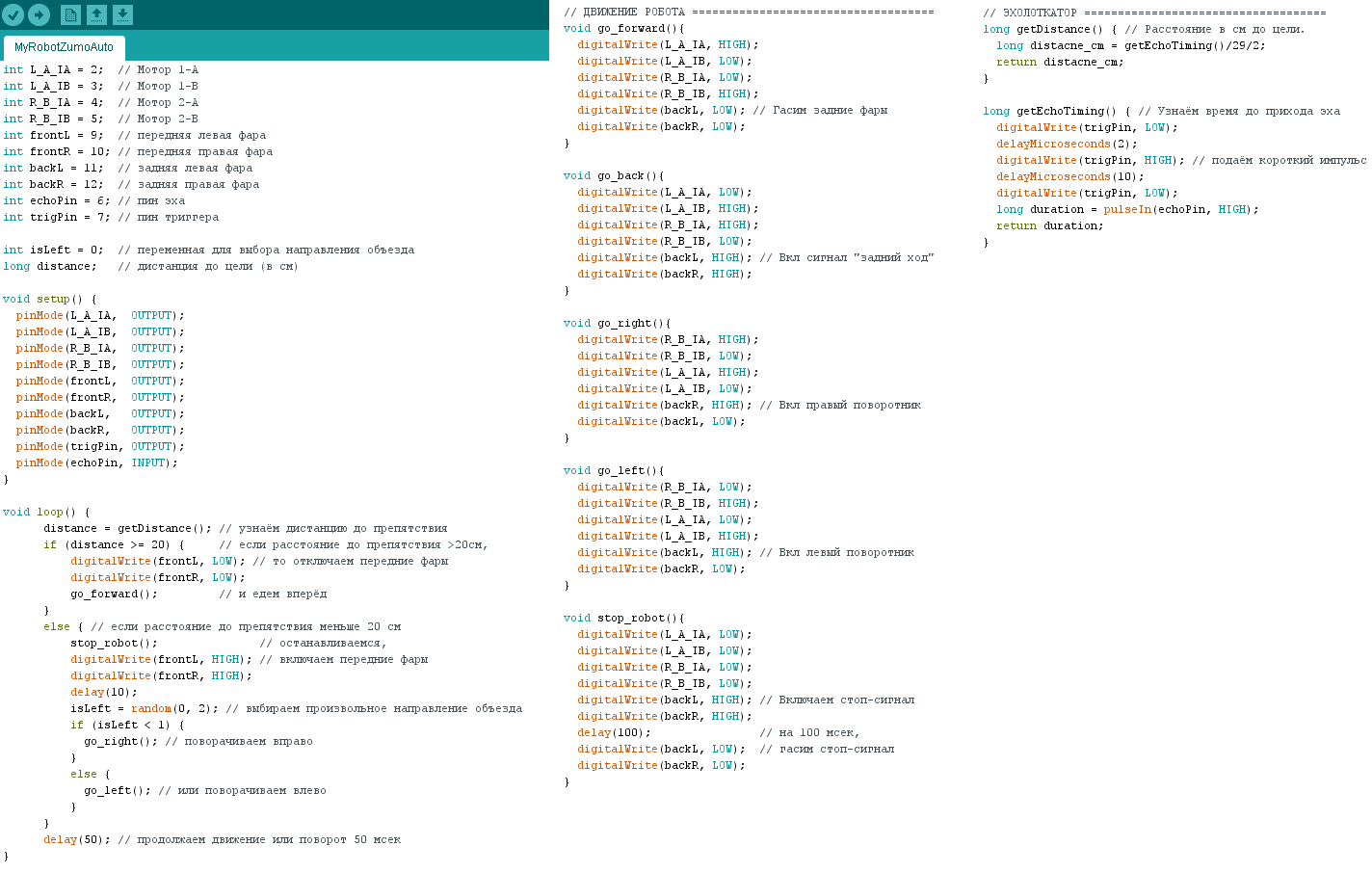
Время написать программу управления нашим вездеходом. Код скетча (программы для Ардуино) показан на иллюстрации.
Основной нюанс в этом скетче - работа с эхолокатором. Суть в том, что мы посылаем короткий импульс - триггер, измеряем время задержки эха - отражения, и по времени задержки определяем расстояние до цели. Если расстояние будет меньше заданного (в скетче - 20 см), то вездеход объезжает его.
Алгоритм управления двигателями мы рассматривали в предыдущей статье. При повороте вездеход будет включать "поворотники", при остановке - стоп-сигнал. При обнаружении препятствия будут включаться передние фары, и вездеход будет объезжать его. Чтобы вездеход был более "интеллектуальным", зададим ему произвольное направление объезда препятствий.
Комментарии в коде поясняют всю программу более подробно.
Основной нюанс в этом скетче - работа с эхолокатором. Суть в том, что мы посылаем короткий импульс - триггер, измеряем время задержки эха - отражения, и по времени задержки определяем расстояние до цели. Если расстояние будет меньше заданного (в скетче - 20 см), то вездеход объезжает его.
Алгоритм управления двигателями мы рассматривали в предыдущей статье. При повороте вездеход будет включать "поворотники", при остановке - стоп-сигнал. При обнаружении препятствия будут включаться передние фары, и вездеход будет объезжать его. Чтобы вездеход был более "интеллектуальным", зададим ему произвольное направление объезда препятствий.
Комментарии в коде поясняют всю программу более подробно.
{kind=link}
{kind=link}