{kind=link}
Вам понадобится
- - Arduino UNO или аналог;
- - Bluetooth-модуль HC-06 или аналог;
- - драйвер двигателя L9110S или аналог;
- - гусеничная платформа для танка Pololu Zumo или аналог;
- - кусок стеклотекстолита по размеру платы Ардуино или шилд для прототипирования;
- - 2 электродвигателя, подходящие к выбранному шасси;
- - 2 светодиода ("фары") и 2 резистора 180-220 Ом;
- - батарейки (1 "Крона" или 4-6 пальчиковых);
- - соединительные провода;
- - паяльник;
- - компьютер;
- - 6-10 болтов М2,5.
Инструкция
1
Крепим электродвигатели к шасси. Я использую два 12 мм мотора с редукторами, купленные в Амперке. Они отлично подходят к выбранной мной гусеничной робоплатформе Pololu Zumo.
{kind=link}
2
Собираем гусеничные шасси по прилагаемой к ним инструкции. Собирается очень просто за 10 минут. Это основа для нашего будущего вездехода. Обращаем внимание, что в данном шасси предусмотрен отсек для 4-х пальчиковых батареек. Нужно будет вывести 2 провода для "+" и "-" наружу, чтобы запитать всю нашу конструкцию. Можно на провода напаять разъём, подходящий к Ардуино. Так будет легче подключить питание к плате. Если используется другая платформа, то нужно найти место для размещения отсека для батареек и также вывести провода для питания платы Ардуино.
{kind=link}
3
Крепим плату Ардуино к шасси. Крепёж на данной робоплатформе не совмещён по отверстиям с крепёжными отверстиями на Arduino UNO. Поэтому я делаю дополнительную платформу из стеклотекстолита, которую закрепляю на шасси с помощью болтов М2,5, а затем прикручиваю к ней плату 4-мя такими же болтами.
{kind=link}
4
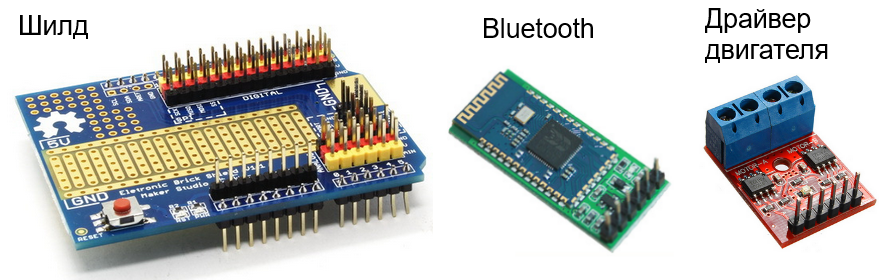
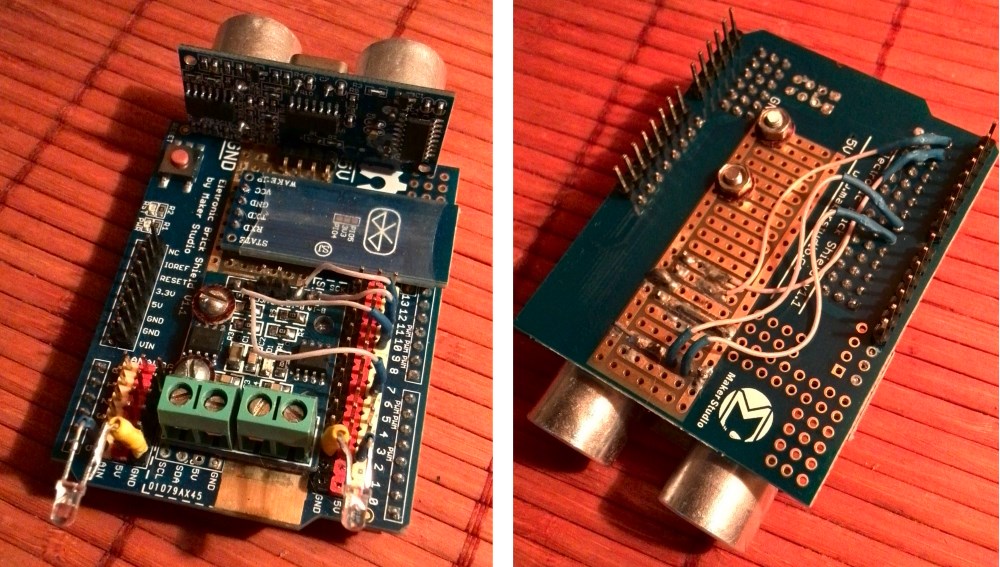
Думаем, как закрепить Bluetooth-модуль, драйвер двигателя и "фары" на шасси, чтобы затем всё это можно было легко подключить к Ардуино. Я воспользуюсь специальной платой, или шилдом (Electronic Brick Shield), таким, как на фото. Но это может быть любой другой шилд или даже просто самодельная плата. Закрепляем драйвер двигателей на шилде с помощью болтов, предварительно просверлив в шилде подходящее отверстие. Смотрим, чтобы сверлом не повредить нужные проводники, если работаем с шилдом. И осторожно: болт металлический, можно случайно устроить замыкание. Поэтому вокруг просверленного отверстия счищаем острым ножом незадействованные проводники. Под гайку и под головку болта подкладываем не проводящие ток шайбы.
{kind=link}
5
Теперь самое сложное и ответственное. Мы должны собрать всё согласно схеме. Подключаем пин Rx Bluetooth-модуля к пину Tx Arduino, пин Tx модуля - к пину Rx Arduino, GND - к земле Ардуино, VCC - к 5 V Ардуино (или к 3,3 V - смотря какой используете BT-модуль). Тут можно воспользоваться пайкой или соединительными проводами со специальными наконечниками типа "Dupont".
Для управления двумя двигателями используется 4 вывода драйвера двигателей + 2 питающих. Поэтому берём любые 4 свободные цифровые пина Ардуино и соединяем с управляющими выводами драйвера двигателя. Конкретные номера выводов пропишем позже в программе, так что сейчас это не критично.
И наконец подключаем светодиоды анодами через резисторы сопротивлением около 200 Ом к двум любым оставшимся свободным пинам Ардуино, а катодами - к GND.
Для управления двумя двигателями используется 4 вывода драйвера двигателей + 2 питающих. Поэтому берём любые 4 свободные цифровые пина Ардуино и соединяем с управляющими выводами драйвера двигателя. Конкретные номера выводов пропишем позже в программе, так что сейчас это не критично.
И наконец подключаем светодиоды анодами через резисторы сопротивлением около 200 Ом к двум любым оставшимся свободным пинам Ардуино, а катодами - к GND.
{kind=link}
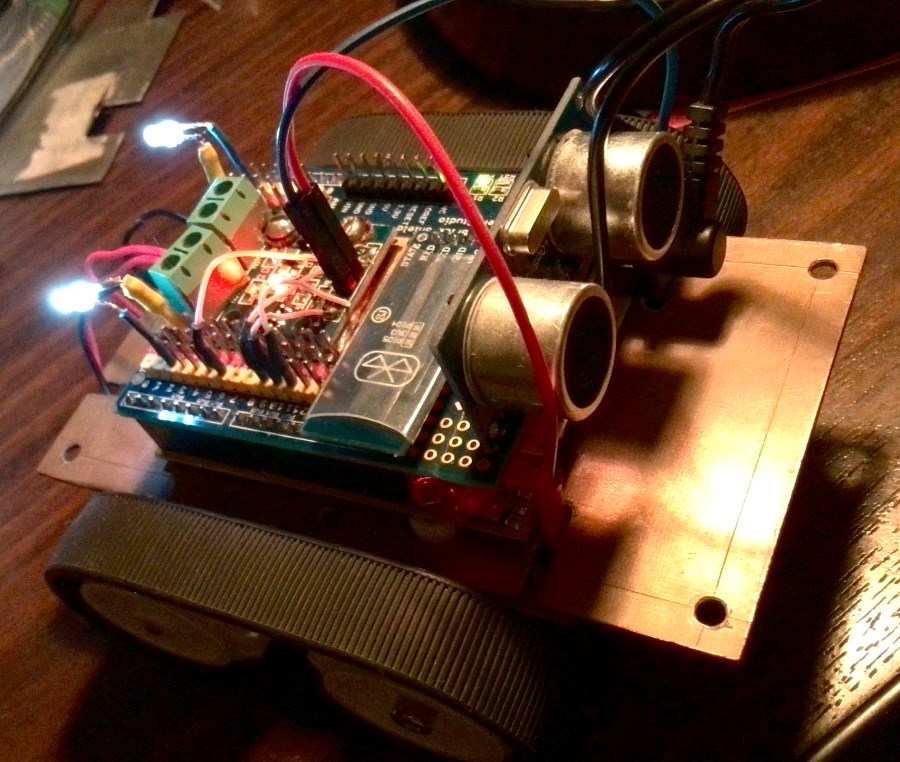
6
В итоге должно получиться что-то вроде того, что показано на фото. У меня здесь также присутствует ультразвуковой дальномер - для того чтобы в дальнейшем наделить вездеход "зрением" и возможностью передвигаться самостоятельно. Но это оставим на потом. В данном варианте вездехода у вас на шилде эхолокатора не будет.
{kind=link}
7
Теперь напишем скетч (программу) для Arduino и загрузим его в память микроконтроллера. Текст программы очень простой и приводится на фото. Загружаем скетч стандартным образом. Как это делается мы уже рассматривали в одной из предыдущих статей. Все задействованные пины в тексте программы соответствуют приведённой выше схеме подключений.
{kind=link}
8
Скачиваем программу для управления нашим вездеходом. Она называется "Arduino Bluetooth RC Car" и бесплатно доступна в маркете приложений Гугл Плей. Приведённый QR-код ведёт на страницу загрузки приложения в Google Play.
{kind=link}
9
После того как загрузили скетч, отключаем Ардуино от компьютера и подключаем наш шилд к Ардуино. Ответственный момент: первое включение нашего вездехода! Если всё подключено правильно, то должны загореться светодиоды на Ардуино и на драйвере двигателей, а светодиод на модуле bluetooth должен быстро мигать.
{kind=link}
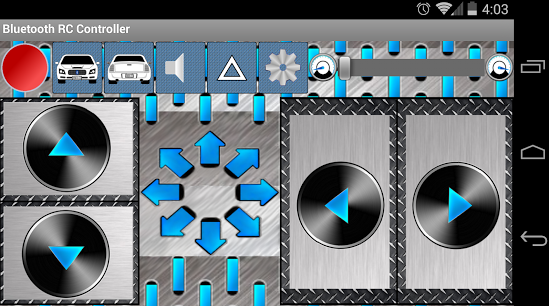
10
Подключаемся к вездеходу по блютуз. Для этого запускаем программу Arduino Bluetooth RC Car. При запуске она спросит разрешения включить bluetooth, если он не включён. Разрешаем. Жмём кнопку с шестерёнкой. Снизу появится меню, нажимаем кнопку "Connect". Вы увидите список сопряжённых с вашим смартфоном устройств, а также доступных поблизости устройств. Одно из этих устройств и будет наш вездеход. Выбираем его из списка. Будет предложено установить сопряжение с этим устройством и ввести код. Обычно это 0000 или 1234 в зависимости от того, какой именно модуль bluetooth вы использовали.
При удачном сопряжении светодиод на модуле начнёт мигать с периодичностью примерно раз в секунду, а индикатор в верхнем левом углу программы станет зелёного цвета. Смартфон запомнит это устройство, и код больше вводить не нужно.
Теперь можно попробовать, что у нас получилось. Вездеход должен ездить вперёд и назад, поворачивать влево-вправо, а также включать и выключать фары.
При удачном сопряжении светодиод на модуле начнёт мигать с периодичностью примерно раз в секунду, а индикатор в верхнем левом углу программы станет зелёного цвета. Смартфон запомнит это устройство, и код больше вводить не нужно.
Теперь можно попробовать, что у нас получилось. Вездеход должен ездить вперёд и назад, поворачивать влево-вправо, а также включать и выключать фары.
{kind=link}
11
Если по команде "Вперёд" вездеход поворачивает или едет назад, значит перепутали провода, идущие на двигатели. Меняя местами жёлтый и зелёный провода, идущие от драйвера к двигателям (на схеме выше), добейтесь того, чтобы вездеход ехал именно туда, куда нужно. Если будут вопросы, пишите их в комментариях к статье!